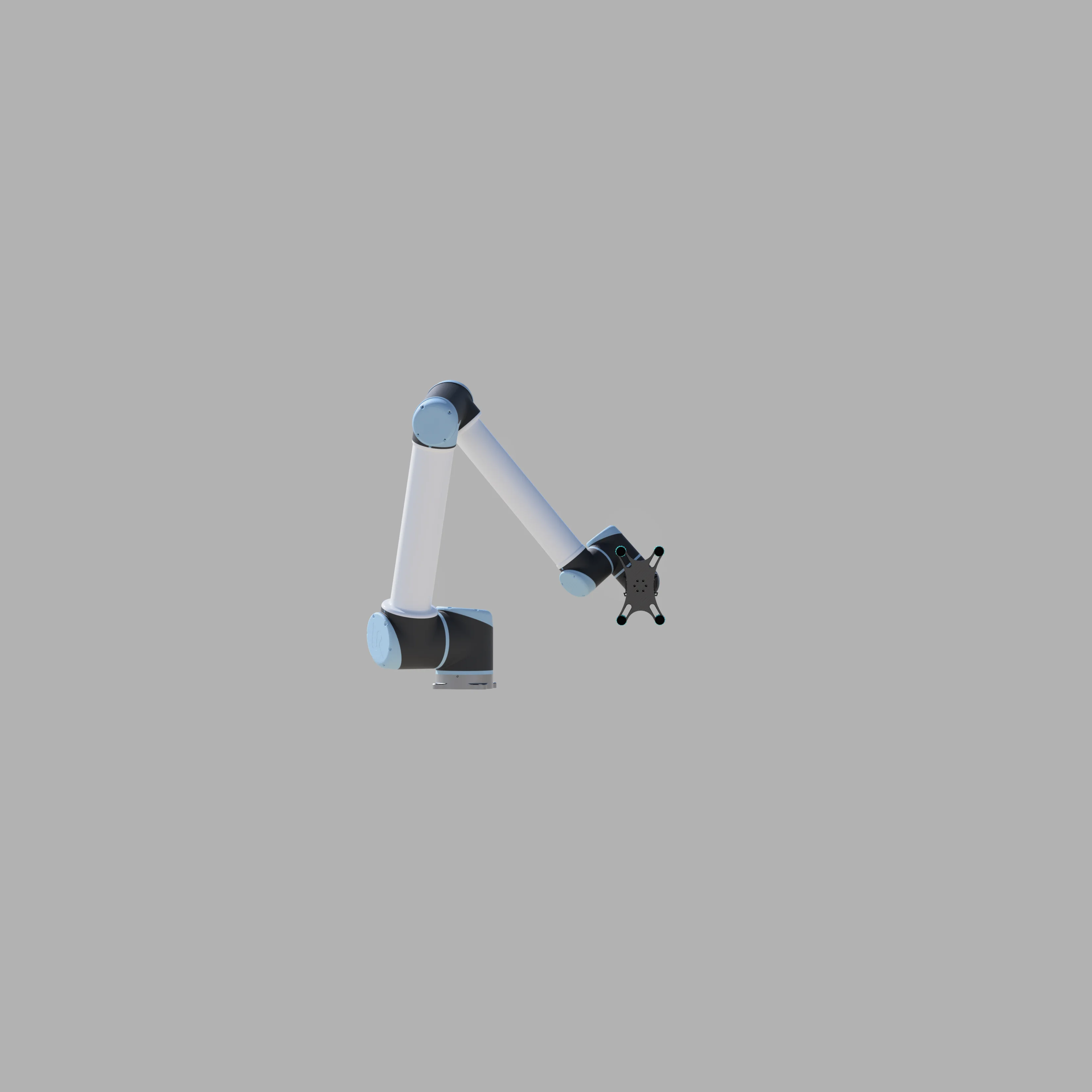
VAC-X — Modularer Vakuum-Greifer
Maßgeschneiderter Endeffektor für den Universal Robots UR5
Technische Details
UR5 Roboterarm-Integration, Thomas 1410 Membranpumpe (24V, ölfrei), ABS + Resin 3D-Druck, modulare Saugnapf-Trägerplatte (1-6 Sauger, werkzeuglose Repositionierung), 3/2-Wege-Magnetventil
Herausforderung
Für die Automatisierung eines Be- und Entladeprozesses an Laser- und Gravurmaschinen fehlte ein geeigneter Endeffektor für den Universal Robots UR5. Kommerzielle Vakuum-Greifer waren entweder zu sperrig, zu teuer oder nicht modular genug für wechselnde Werkstückgeometrien. Der Greifer musste leicht, kompakt und werkzeuglos konfigurierbar sein — mit direkter Integration in die 24V-Kontrollbox des UR5.
Lösung
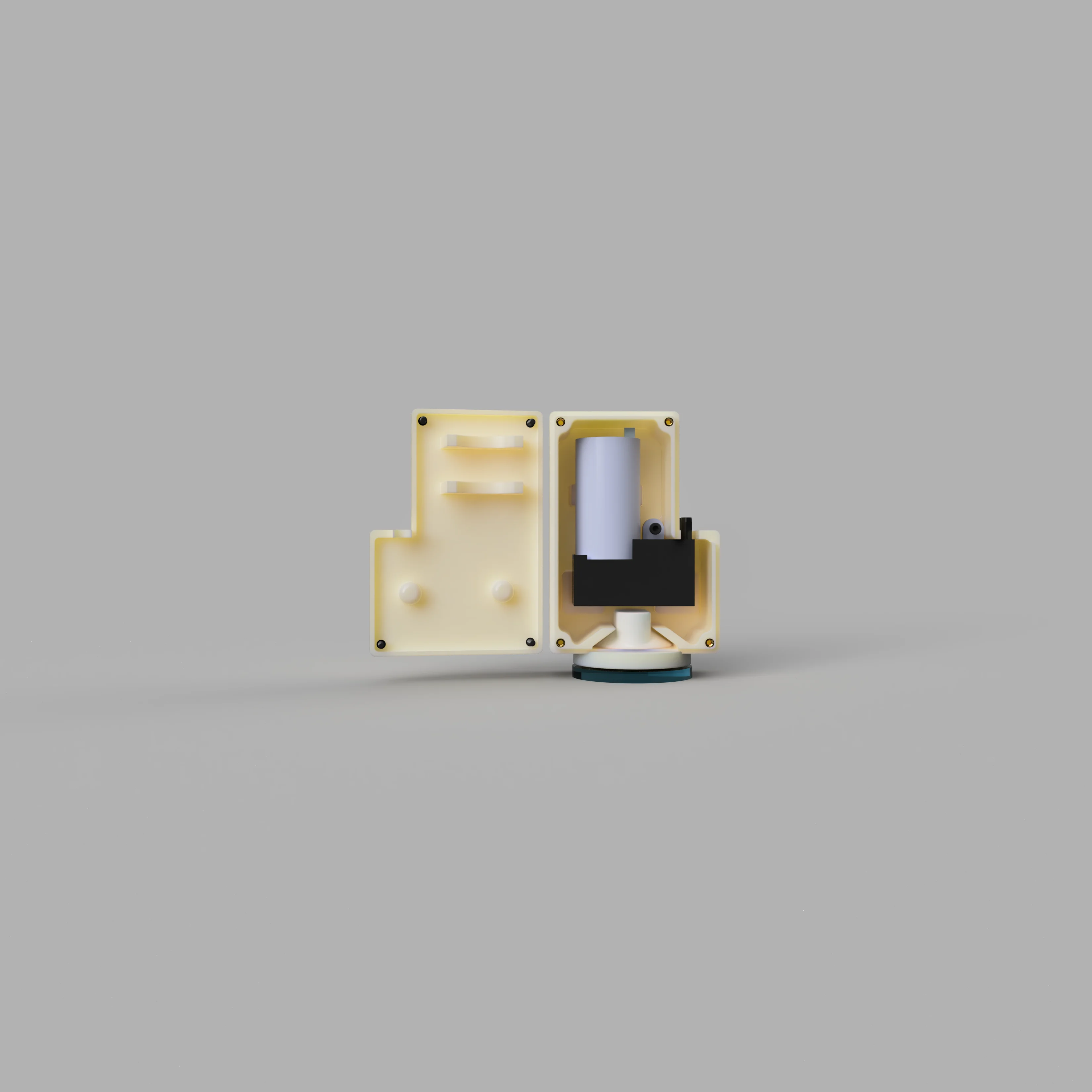
Komplett eigenes Design von Grund auf: Eine 3D-gedruckte Ventilbox aus ABS beherbergt das 3/2-Wege-Magnetventil und die Pneumatik-Anschlüsse. Der Vakuum-Verteiler wurde im Resin-Druckverfahren gefertigt, um eine luftdichte Versiegelung ohne Nachbearbeitung zu garantieren. Die modulare Trägerplatte ermöglicht die werkzeuglose Konfiguration von 1 bis 6 Saugnäpfen je nach Werkstückgröße.
Das Pumpengehäuse nutzt eine Thomas 1410 Membranpumpe (24V, ölfrei) mit 3,7 l/min Förderleistung. Die schlanke Gesamtbauweise maximiert die Bewegungsfreiheit des Roboterarms. Alle Komponenten wurden in Fusion 360 konstruiert und dokumentiert.
Ergebnis
Ein voll funktionsfähiger, modularer Vakuum-Greifer mit einer Traglast von bis zu 1.500g. Werkzeugloser Wechsel der Saugnapf-Konfiguration in unter 30 Sekunden. Direkte Ansteuerung über die UR5-Kontrollbox ohne externe Steuerung. Kosten pro Einheit deutlich unter vergleichbaren kommerziellen Lösungen.
Bildergalerie